Epson G10-854SR Roboter Montagestation Dosierstation
Montage von Teilen für Autoradios und Navigationssysteme sowie zum
Prüfen derselben.
Die Montagestation ist als geschlossenes Alu-Gestell mit eingesetzten
Stahl-Schweißrahmen ausgeführt und sehr kompakt aufgebaut.
Die Schaltschränke und Ventilinseln sind in die Anlage integriert.
Alle Bewegungsvorgänge während des Betriebes der Anlage können
durch großflächige Fenster und Türen allseitig verfolgt werden.
Die Bedienung erfolgt über ein Touchscreen.
Die Montagestation unterteilt sich in die Teilstationen 3.1
Dosierbereich, 3.2 Montagebereich
KK+SW und 3.3 Montagebereich Front. (KK=Kühlkörper,
SW=Stirnwandwinkel)
Nachfolgend sind die Arbeitsschritte entsprechend dieser
Montagebereiche beschrieben:
St.3.1: Dosierbereich
- über das Transferband läuft ein WT mit aufgesetzten Chassis und
Leiterplatten in den Dosierbereich ein.
- dieser wird an der Hub-Positionier-Einheit (HuPo) gestoppt und vom
Band abgehoben und fixiert
- nun wird das x-y-z-Handling den Dosierkopf an die vorgesehene Stelle
fahren und den Dosiervorgang starten.
- nach Abschluss der erfolgreichen Dosierung fährt das Handling über
die Ruhe-position und der WT wird auf das Band abgesetzt
- Weitertransport in den Montagebereich KK+S\WV (Voraussetzung kein WT
in Bestückposition)
Die Dosiermenge kann in der Steuerung des Dispensers (Fa.
Scheugenpflug) und über die SPS je nach Position ausgewählt
werden
Die Positionen können über das Bedienpanel geteacht werden
St.3.2: Montagebereich KK+SW
- über das Transferband läuft ein WT aus dem Dosierbereich in den
Montagebereich KK+SW ein.
- dieser wird an der Hub-Positionier-Einheit (HuPo) gestoppt, vom Band
abgehoben und fixiert, dabei werden die Chassisseitenwände der
teilmontierten Baugruppe ausgerichtet
- zeitgleich erfolgt die KK-Trayund SW-Tray-Positionierung
- ein KK-Traystapel (12) sowie ein SW-Traystapel (12) werden manuell
außerhalb der Schutzumhausung auf das jeweilige Einschleusband
gestellt
- die beiden Sicherheitsschotts werden geöffnet und die bestückten
Traystapel laufen in die Greifposition des jeweiligen Staplers ein
- die beiden Sicherheitsschotts werden wieder geschlossen
- die jeweiligen Greifer greifen den entsprechenden Tray
- mit der z-Achse erfolgt die Tray Vereinzelung und der Transport
nach oben (über die eigentliche Höhe der Entnahme)
- zur Zentrierung und Traystabilisierung wird eine Zentrierauflage
mittels x-Handing unter den jeweiligen Tray geschoben und
positioniert.
- mit der Stapler-z-Achse wird der jeweilige Tray auf die
entsprechende Zentrierauflage aufgesetzt
- die Trays sind zur Entnahme der Bauteile bereit
- mit dem Mehrfachgreifer am Scara-Roboter wird der KK im Tray
gegriffen und in eine Zwischenposition als Ausrichthilfe abgelegt (um
Ungenauigkeiten beim Abholen aus dem eichbleibende Greifposition
für die Montage zu erreichen)
- der KK wird gescannt, erneut gegriffen und bei i.O. Ergebnis des
Scanners auf dem WT verbaut
- der n.i.O. KK wird in einer n.i.O. Kiste abgelegt
- der Mehrfachgreifer am Scara-Roboter greift anschließend die SW im
Tray und legt sie in der Ausrichtposition ab
- der SW wird erneut gegriffen und auf dem WT verbaut
- weiter mit Montagebereich Front
- sind die bereitgestellten Trays leer, erfolgt deren Ablage auf dem
entsprechenden Ausschleusband
- dazu werden die Stapler mittels x-Achsen entsprechend positioniert
- das Ausschleusen der leeren Trays erfolgt erst, wenn die kompletten
Traystapel abgearbeitet sind
- die entsprechenden Sicherheitsschotts werden geöffnet und die
leeren Traystapel werden zur manuellen Entnahme ausgeschleust
- die beiden Sicherheitsschotts werden wieder geschlossen
St.3.3: Montagebereich Front
- die Front ist auf dem umlaufenden WT in einem separaten Nest
positioniert
- mit dem Mehrfachgreifer am Scara-Roboter erfolgt die Entnahme der
Front aus dem mit KK und SW bestückten WT im Montagebereich KK+SW
- die Front wird im Nest einer Montageeinheit positioniert
- der WT läuft über das Transferband aus dem Montagebereich KK+SW in
den Montagebereich Front und wird von der HubPositioniereinheit
gestoppt, vom Band abgehoben und fixiert, dabei wird das Chassis
niedergehalten
- die positionierte Front wird über eine Dreh-Hubbewegung auf dem WT
gefügt
- nach Abschluss der erfolgreichen Frontmontage fährt die
Montageeinheit in Ausgangsposition und der WT wird auf das Band
abgesetzt
- weiter > Station 4
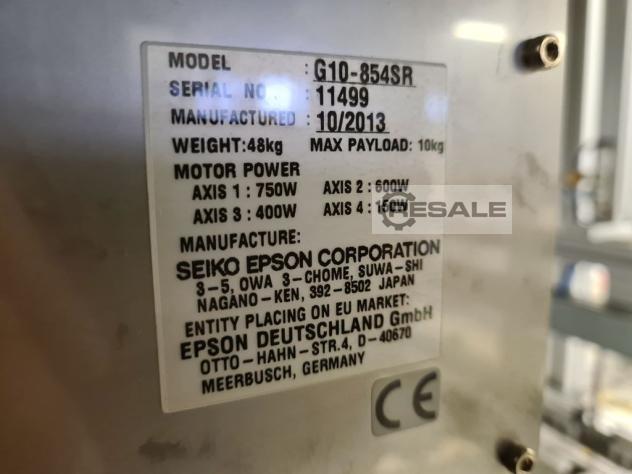
Epson Scara G10-854SR Roboter
Technische Daten
Bauart: SCARA (4 achsige Roboter)
Traglast: nom. 5 kg, max. 10 kg
Reichweite Horizontal: 850 mm
Reichweite Vertikal: Achse 3: 420 mm
Reichweite Orientierung: J4: +/- 360 °
Wiederholgenauigkeit Horizontal: +/- 0,025 mm
Wiederholgenauigkeit Vertikal: J3: +/- 0,01 mm
Wiederholgenauigkeit Orientierung: J4: +/- 0,005 °
Max. Betriebsbereich: Achse 1: +/- 152 °, Achse 2: +/- 152,5 °,
Achse 3: 420 mm, Achse 4: +/- 360 °
Max. Betriebsgeschwindigkeit: J1,J2: +/- 11.000 mm/s, J3: +/- 2.350
mm/s, J4: +/- 2.400 °/s
Zulässiges Trägheitsmoment: nom. 0,02 kgm², max. 0,25 kgm²
Anwenderverkabelung Elektrisch: 1x D-Sub 9 pin, 1x D-Sub 15 pin
Z-Achse: Ø Außen: 25 mm
Einpresskraft: 250 N
Gewicht: 48 kg
Steuerung: EPSON RC180
Art der Montage: Decke
IP Schutzklasse: IP20
Power - und Signalkabel: 3m
Weitere Montagemodule in anderen Größen- neu und gebraucht - finden
Sie in unserem Shop!
Internationale Versandkosten auf Anfrage!



 Deutschland
Deutschland
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}